Installation on Ubuntu 14.04¶
ROS Indigo ++¶
From http://wiki.ros.org/indigo/Installation/Ubuntu.
Required tools¶
sudo sh -c "echo 'deb http://packages.ros.org/ros/ubuntu $(lsb_release -cs) main' > /etc/apt/sources.list.d/ros-latest.list"
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
sudo apt update
sudo apt install python-rosdep python-catkin-tools ros-indigo-catkin python-wstool python-vcstool
Fix Locales¶
sudo locale-gen en_US #warnings might occur
sudo locale-gen en_US.UTF-8
sudo nano /etc/environment
# put theses lines
LANGUAGE=en_US
LC_ALL=en_US
# Reboot !
If you type perl you should not see any warnings.
ROS Indigo Desktop¶
# ROS Desktop (NOT DESKTOP-FULL)
sudo apt install ros-indigo-desktop
Warning
Do not install desktop-full (desktop + gazebo 2.2) as we’ll use Gazebo 7.
After Install¶
# Load The environment
source /opt/ros/indigo/setup.bash
# Update ROSdep (to get dependencies automatically)
sudo rosdep init
rosdep update
MoveIt! (via debians)¶
# MoveIt!
sudo apt install ros-indigo-moveit
MoveIt! (from source)¶
If you need bleeing-edge features, compile MoveIt! from source :
mkdir -p ~/isir/moveit_ws/src
cd ~/isir/moveit_ws/src
# Get all the packages
wstool init
wstool merge https://raw.githubusercontent.com/ros-planning/moveit_docs/indigo-devel/moveit.rosinstall
wstool update -j2
cd ~/isir/moveit_ws/
# Install dependencies
source /opt/ros/indigo/setup.bash
rosdep install --from-paths ~/isir/moveit_ws/src --ignore-src --rosdistro indigo -y -r
# Configure the workspace
catkin config --init --install --extend /opt/ros/indigo --cmake-args -DCMAKE_BUILD_TYPE=Release
# Build
catkin build
OROCOS 2.9 + rtt_ros_integration 2.9 (from source)¶
If you already completed these instructions, and you are upgrading from orocos 2.8 :
- If you installed orocos 2.8 from the debians, you need to remove them
sudo apt remote ros-kinetic-orocos-toolchain ros-kinetic-rtt-*. - If you installed orocos 2.8 from source, they can live side by side in a different workspace, but always check
catkin configon your lwr_ws to make sure which workspace you are extending.
Additionally, please make sure that these repos (if you have them) are in the right branches (with fixes for rtt) :
roscd rtt_dot_service && git remote set-url origin https://github.com/kuka-isir/rtt_dot_service.git && git pull
roscd fbsched && git remote set-url origin https://github.com/kuka-isir/fbsched.git && git pull
roscd conman && git remote set-url origin https://github.com/kuka-isir/conman.git && git pull
OROCOS toolchain 2.9¶
mkdir -p ~/isir/orocos-2.9_ws/src
cd ~/isir/orocos-2.9_ws/src
# Get all the packages
wstool init
wstool merge https://raw.githubusercontent.com/kuka-isir/rtt_lwr/rtt_lwr-2.0/lwr_utils/config/orocos_toolchain-2.9.rosinstall
wstool update -j2
# Get the latest updates (OPTIONAL)
cd orocos_toolchain
git submodule foreach git checkout toolchain-2.9
git submodule foreach git pull
# Configure the workspace
cd ~/isir/orocos-2.9_ws/
# Install dependencies
source /opt/ros/indigo/setup.bash
rosdep install --from-paths ~/isir/orocos-2.9_ws/src --ignore-src --rosdistro indigo -y -r
catkin config --init --install --extend /opt/ros/indigo/ --cmake-args -DCMAKE_BUILD_TYPE=Release
# Build
catkin build
rtt_ros_integration 2.9¶
mkdir -p ~/isir/rtt_ros-2.9_ws/src
cd ~/isir/rtt_ros-2.9_ws/src
# Get all the packages
wstool init
wstool merge https://github.com/kuka-isir/rtt_lwr/raw/rtt_lwr-2.0/lwr_utils/config/rtt_ros_integration-2.9.rosinstall
wstool update -j2
# Configure the workspace
cd ~/isir/rtt_ros-2.9_ws/
# Install dependencies
source ~/isir/orocos-2.9_ws/install/setup.bash
rosdep install -q --from-paths ~/isir/rtt_ros-2.9_ws/src --ignore-src --rosdistro indigo -y -r
catkin config --init --install --extend ~/isir/orocos-2.9_ws/install --cmake-args -DCMAKE_BUILD_TYPE=Release
# Build (this can take a while)
catkin build
Gazebo 7¶
From http://gazebosim.org/tutorials?tut=install_ubuntu&cat=install.
Note
If you already have gazebo 2.2 installed, please remove it : sudo apt remove gazebo libgazebo-dev ros-indigo-gazebo-*
# Gazebo 7
curl -ssL http://get.gazebosim.org | sh
# The ros packages
sudo apt install ros-indigo-gazebo7-*
Note
Don’t forget to put source source /usr/share/gazebo/setup.sh in your ~/isir/.bashrc or you won’t have access to the gazebo plugins (Simulated cameras, lasers, etc).
ROS Control¶
This allows you to use MoveIt! or just the ros_control capabilities in an orocos environnement. Let’s install everything :
sudo apt install ros-indigo-ros-control* ros-indigo-control*
RTT LWR packages¶
mkdir -p ~/isir/lwr_ws/src/
cd ~/isir/lwr_ws/src
# Get all the packages
wstool init
# Get rtt_lwr 'base'
wstool merge https://raw.githubusercontent.com/kuka-isir/rtt_lwr/rtt_lwr-2.0/lwr_utils/config/rtt_lwr.rosinstall
# Get the extra packages
wstool merge https://raw.githubusercontent.com/kuka-isir/rtt_lwr/rtt_lwr-2.0/lwr_utils/config/rtt_lwr-extras.rosinstall
# Download
wstool update -j2
Note
If you want to install and test cart_opt_ctrl : wstool merge https://raw.githubusercontent.com/kuka-isir/rtt_lwr/rtt_lwr-2.0/lwr_utils/config/rtt_lwr-full.rosinstall
Install dependencies¶
source ~/isir/rtt_ros-2.9_ws/install/setup.bash
rosdep install --from-paths ~/isir/lwr_ws/src --ignore-src --rosdistro indigo -y -r
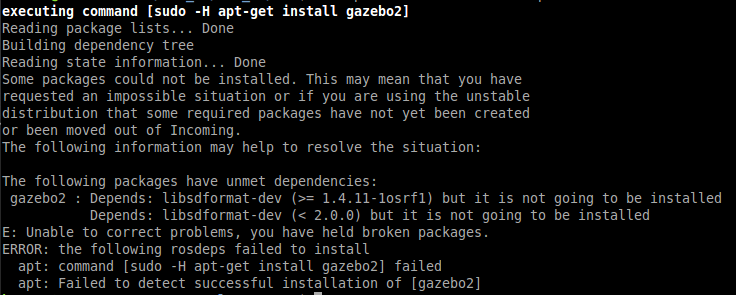
Note
On indigo, rosdep will try to install gazebo 2, but will fail as we already installed gazebo 7. So you can ignore this error if you are running indigo. On ROS kinetic, it will install gazebo7 automatically.
Configure the workspace¶
cd ~/isir/lwr_ws
catkin config --init --extend ~/isir/rtt_ros-2.9_ws/install --cmake-args -DCMAKE_BUILD_TYPE=Release
Build the workspace¶
Let’s build the entire workspace :
catkin build --worspace ~/isir/lwr_ws
Once it’s done, load the workspace :
source ~/isir/lwr_ws/devel/setup.bash
Tip
Put it in you bashrc : echo 'source ~/isir/lwr_ws/devel/setup.bash' >> ~/.bashrc
Now we can test the installation.