MoveIt! with rtt_ros_control_embedded¶
As the other packages, we’ll use the run.launch from lwr_utils that we duplicated in the lwr_moveit_config package for custom arguments.
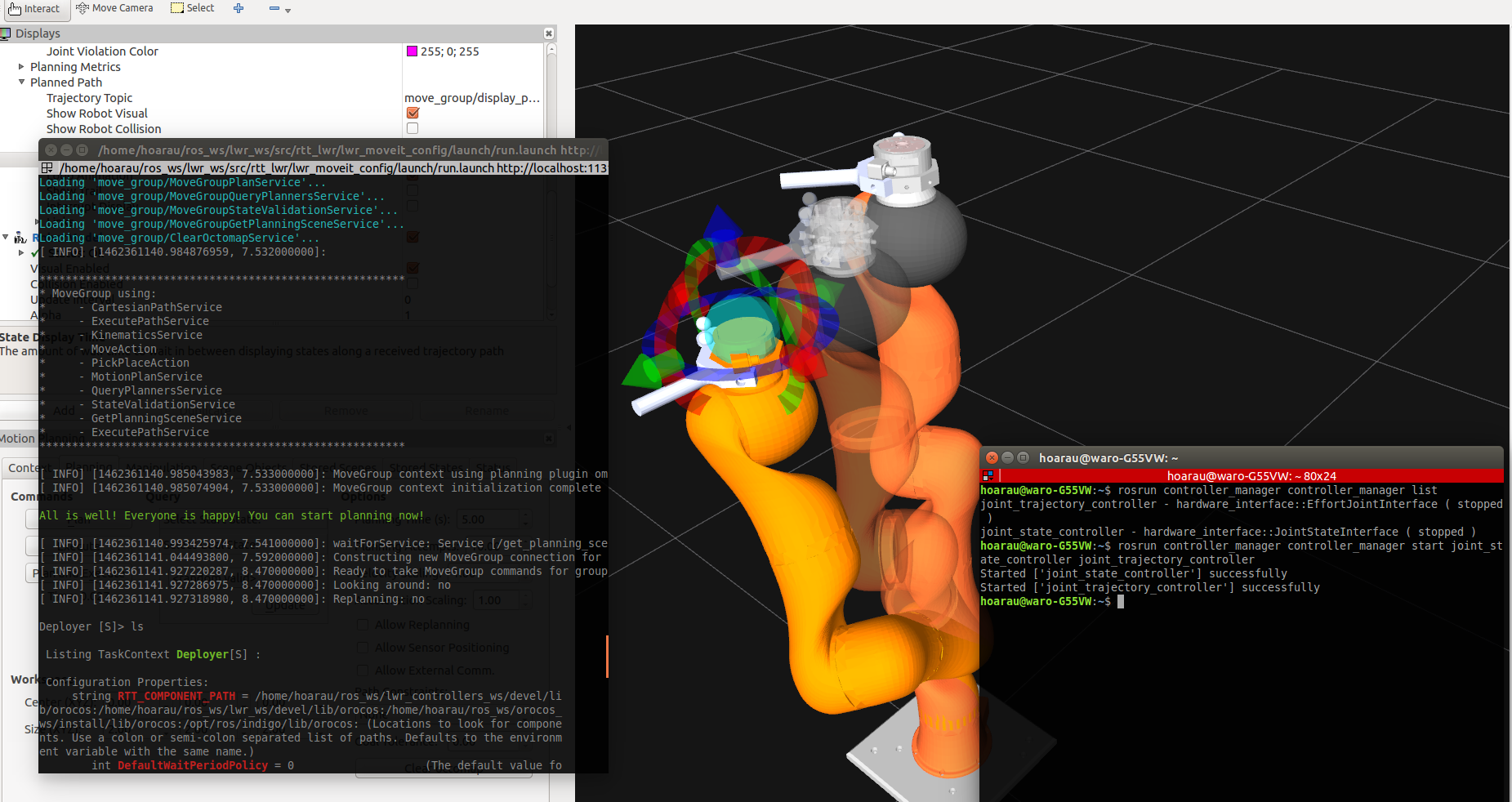
roslaunch lwr_moveit_config run.launch sim:=true
Then you can list available ros_control controllers :
rosrun controller_manager controller_manager list
Note
These commands launch the following RTT Components :
o gazebo
o lwr_sim
o rtt_ros_control_embedded
--> controller_manager
--> hardware interface
Then you have access to the full ros_control interface as a normal ROS module, so you can create you own ros_controllers.
http://wiki.ros.org/ros_control.